
1 Q. Parallel Implementation of any
one simple Algorithm
a.
Introduction and Usefulness of
Algorithm
b.
Simple Implementation
c.
Parallel Implementation
d.
SpeedUp Analysis
Parallel merge sort:
- dividing problem into two or more smaller independent sub-problems of the same type of problem
- solving each sub-problem recursively
- and combining their results.
Sub-problem independency makes divide and conquer algorithms natural for dynamic task parallelism. Quicksort is a good example (actually you can find its parallel version here).
We’ll focus on parallel merge sort as it better parallelizes. Basically
the term parallelism means ratio T1/Ti where T1 is the execution time
on a single processor and Ti is the execution on infinite number of
processors.
Let’s implement sequential merge sort first as parallel merge sort will use it. In general merge sort in terms of divide and conquer defined as follows:
- If the array is of size 0 or 1 it is already sorted; otherwise divide it into two sub-arrays of about half the size
- recursively sort each sub-array
- and merge sorted sub-arrays into one sorted array.
It is quite straightforward with a small improvement that allows to avoid unnecessary allocations and data copying.
class MergeSortHelper<T>
{
private readonly IComparer<T> _comparer;
public MergeSortHelper()
: this(Comparer<T>.Default)
{
}
public MergeSortHelper(IComparer<T> comparer)
{
_comparer = comparer;
}
public void MergeSort(T[] array, int low, int high, bool parallel)
{
// Create a copy of the original array. Switching between
// original array and its copy will allow to avoid
// additional array allocations and data copying.
var copy = (T[]) array.Clone();
if (parallel)
ParallelMergeSort(array, copy, low, high, GetMaxDepth());
else
SequentialMergeSort(array, copy, low, high);
}
private void SequentialMergeSort(T[] to, T[] temp, int low, int high)
{
if (low >= high)
return;
var mid = (low + high) / 2;
// On the way down the recursion tree both arrays have
// the same data so we can switch them. Sort two
// sub-arrays first so that they are placed into the temp
// array.
SequentialMergeSort(temp, to, low, mid);
SequentialMergeSort(temp, to, mid + 1, high);
// Once temp array contains two sorted sub-arrays
// they are merged into target array.
SequentialMerge(to, temp, low, mid, mid + 1, high, low);
// On the way up either we are done as the target array
// is the original array and now contains required
// sub-array sorted or it is the temp array from previous
// step and contains smaller sub-array that will be
// merged into the target array from previous step
// (which is the temp array of this step and so we
// can destroy its contents).
}
// Although sub-arrays being merged in sequential version
// are adjacent that is not the case for parallel version
// and thus sub-arrays boundaries must be specified
// explicitly.
private void SequentialMerge(T[] to, T[] temp, int lowX, int highX, int lowY, int highY, int lowTo)
{
var highTo = lowTo + highX - lowX + highY - lowY + 1;
for (; lowTo <= highTo; lowTo++)
{
if (lowX > highX)
to[lowTo] = temp[lowY++];
else if (lowY > highY)
to[lowTo] = temp[lowX++];
else
to[lowTo] = Less(temp[lowX], temp[lowY])
? temp[lowX++]
: temp[lowY++];
}
}
private bool Less(T x, T y)
{
return _comparer.Compare(x, y) < 0;
}
{
private readonly IComparer<T> _comparer;
public MergeSortHelper()
: this(Comparer<T>.Default)
{
}
public MergeSortHelper(IComparer<T> comparer)
{
_comparer = comparer;
}
public void MergeSort(T[] array, int low, int high, bool parallel)
{
// Create a copy of the original array. Switching between
// original array and its copy will allow to avoid
// additional array allocations and data copying.
var copy = (T[]) array.Clone();
if (parallel)
ParallelMergeSort(array, copy, low, high, GetMaxDepth());
else
SequentialMergeSort(array, copy, low, high);
}
private void SequentialMergeSort(T[] to, T[] temp, int low, int high)
{
if (low >= high)
return;
var mid = (low + high) / 2;
// On the way down the recursion tree both arrays have
// the same data so we can switch them. Sort two
// sub-arrays first so that they are placed into the temp
// array.
SequentialMergeSort(temp, to, low, mid);
SequentialMergeSort(temp, to, mid + 1, high);
// Once temp array contains two sorted sub-arrays
// they are merged into target array.
SequentialMerge(to, temp, low, mid, mid + 1, high, low);
// On the way up either we are done as the target array
// is the original array and now contains required
// sub-array sorted or it is the temp array from previous
// step and contains smaller sub-array that will be
// merged into the target array from previous step
// (which is the temp array of this step and so we
// can destroy its contents).
}
// Although sub-arrays being merged in sequential version
// are adjacent that is not the case for parallel version
// and thus sub-arrays boundaries must be specified
// explicitly.
private void SequentialMerge(T[] to, T[] temp, int lowX, int highX, int lowY, int highY, int lowTo)
{
var highTo = lowTo + highX - lowX + highY - lowY + 1;
for (; lowTo <= highTo; lowTo++)
{
if (lowX > highX)
to[lowTo] = temp[lowY++];
else if (lowY > highY)
to[lowTo] = temp[lowX++];
else
to[lowTo] = Less(temp[lowX], temp[lowY])
? temp[lowX++]
: temp[lowY++];
}
}
private bool Less(T x, T y)
{
return _comparer.Compare(x, y) < 0;
}
}
Now we need to parallelize it. Let’s get obvious out of the way.
Sorting two sub-arrays can be done in parallel just like parallel
quicksort. We can proceed to merge step only once both sub-arrays are
sorted.
Parallelizing merge is a more interesting task. Sequential version
looks like a single indivisible task. We need to find a way to separate
merging into independent tasks that can be run in parallel. The idea
behind algorithm is the following:
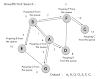
- Let’s assume we want to merge sorted arrays X and Y. Select X[m] median element in X. Elements in X[ .. m-1] are less than or equal to X[m]. Using binary search find index k of the first element in Y greater than X[m]. Thus Y[ .. k-1] are less than or equal to X[m] as well. Elements in X[m+1 .. ] are greater than or equal to X[m] and Y[k .. ] are greater. So merge(X, Y) can be defined as concat(merge(X[ .. m–1], Y[ .. k–1]), X[m], merge(X[m+1 .. ], Y[k .. ]))
- now we can recursively in parallel do merge(X[ .. m-1], Y[ .. k–1]) and merge(X[m+1 .. ], Y[k .. ])
- and then concat results.
Although algorithm description pretty abstract there will be more detailed comments in code below.
private const int SEQUENTIAL_THRESHOLD = 2048;
// Recursion depth is utilized to limit number of spawned
// tasks.
private void ParallelMergeSort(T[] to, T[] temp, int low, int high, int depth)
{
if (high - low + 1 <= SEQUENTIAL_THRESHOLD || depth <= 0)
{
// Resort to sequential algorithm if either
// recursion depth limit is reached or sub-problem
// size is not big enough to solve it in parallel.
SequentialMergeSort(to, temp, low, high);
return;
}
var mid = (low + high) / 2;
// The same target/temp arrays switching technique
// as in sequential version applies in parallel
// version. sub-arrays are independent and thus can
// be sorted in parallel.
depth--;
Parallel.Invoke(
() => ParallelMergeSort(temp, to, low, mid, depth),
() => ParallelMergeSort(temp, to, mid + 1, high, depth)
);
// Once both taks ran to completion merge sorted
// sub-arrays in parallel.
ParallelMerge(to, temp, low, mid, mid + 1, high, low, depth);
}
// As parallel merge is itself recursive the same mechanism
// for tasks number limititation is used (recursion depth).
private void ParallelMerge(T[] to, T[] temp, int lowX, int highX, int lowY, int highY, int lowTo, int depth)
{
var lengthX = highX - lowX + 1;
var lengthY = highY - lowY + 1;
if (lengthX + lengthY <= SEQUENTIAL_THRESHOLD || depth <= 0)
{
// Resort to sequential algorithm in case of small
// sub-problem or deep recursion.
SequentialMerge(to, temp, lowX, highX, lowY, highY, lowTo);
return;
}
if (lengthX < lengthY)
{
// Make sure that X range no less than Y range and
// if needed swap them.
ParallelMerge(to, temp, lowY, highY, lowX, highX, lowTo, depth);
return;
}
// Get median of the X sub-array. As X sub-array is
// sorted it means that X[lowX .. midX - 1] are less
// than or equal to median and X[midx + 1 .. highX]
// are greater or equal to median.
var midX = (lowX + highX) / 2;
// Find element in the Y sub-array that is strictly
// greater than X[midX]. Again as Y sub-array is
// sorted Y[lowY .. midY - 1] are less than or equal
// to X[midX] and Y[midY .. highY] are greater than
// X[midX].
var midY = BinarySearch(temp, lowY, highY, temp[midX]);
// Now we can compute final position in the target
// array of median of the X sub-array.
var midTo = lowTo + midX - lowX + midY - lowY;
to[midTo] = temp[midX];
// The rest is to merge X[lowX .. midX - 1] with
// Y[lowY .. midY - 1] and X[midx + 1 .. highX]
// with Y[midY .. highY] preceeding and following
// median respectively in the target array. As
// pairs are idependent from their final position
// perspective they can be merged in parallel.
depth--;
Parallel.Invoke(
() => ParallelMerge(to, temp, lowX, midX - 1, lowY, midY - 1, lowTo, depth),
() => ParallelMerge(to, temp, midX + 1, highX, midY, highY, midTo + 1, depth)
);
}
// Searches for index the first element in low to high
// range that is strictly greater than provided value
// and all elements within specified range are smaller
// or equal than index of the element next to range is
// returned.
private int BinarySearch(T[] from, int low, int high, T lessThanOrEqualTo)
{
high = Math.Max(low, high + 1);
while (low < high)
{
var mid = (low + high) / 2;
if (Less(from[mid], lessThanOrEqualTo))
low = mid + 1;
else
high = mid;
}
return low;
}
private static int GetMaxDepth()
{
// Although at each step we split unsorted array
// into two equal size sub-arrays sorting them
// not be perfectly balanced because parallel merge
// may not be balanced. So we add some extra space for
// task creation and so will keep CPUs busy.
return (int) Math.Log(Environment.ProcessorCount, 2) + 4;
}
}
// Recursion depth is utilized to limit number of spawned
// tasks.
private void ParallelMergeSort(T[] to, T[] temp, int low, int high, int depth)
{
if (high - low + 1 <= SEQUENTIAL_THRESHOLD || depth <= 0)
{
// Resort to sequential algorithm if either
// recursion depth limit is reached or sub-problem
// size is not big enough to solve it in parallel.
SequentialMergeSort(to, temp, low, high);
return;
}
var mid = (low + high) / 2;
// The same target/temp arrays switching technique
// as in sequential version applies in parallel
// version. sub-arrays are independent and thus can
// be sorted in parallel.
depth--;
Parallel.Invoke(
() => ParallelMergeSort(temp, to, low, mid, depth),
() => ParallelMergeSort(temp, to, mid + 1, high, depth)
);
// Once both taks ran to completion merge sorted
// sub-arrays in parallel.
ParallelMerge(to, temp, low, mid, mid + 1, high, low, depth);
}
// As parallel merge is itself recursive the same mechanism
// for tasks number limititation is used (recursion depth).
private void ParallelMerge(T[] to, T[] temp, int lowX, int highX, int lowY, int highY, int lowTo, int depth)
{
var lengthX = highX - lowX + 1;
var lengthY = highY - lowY + 1;
if (lengthX + lengthY <= SEQUENTIAL_THRESHOLD || depth <= 0)
{
// Resort to sequential algorithm in case of small
// sub-problem or deep recursion.
SequentialMerge(to, temp, lowX, highX, lowY, highY, lowTo);
return;
}
if (lengthX < lengthY)
{
// Make sure that X range no less than Y range and
// if needed swap them.
ParallelMerge(to, temp, lowY, highY, lowX, highX, lowTo, depth);
return;
}
// Get median of the X sub-array. As X sub-array is
// sorted it means that X[lowX .. midX - 1] are less
// than or equal to median and X[midx + 1 .. highX]
// are greater or equal to median.
var midX = (lowX + highX) / 2;
// Find element in the Y sub-array that is strictly
// greater than X[midX]. Again as Y sub-array is
// sorted Y[lowY .. midY - 1] are less than or equal
// to X[midX] and Y[midY .. highY] are greater than
// X[midX].
var midY = BinarySearch(temp, lowY, highY, temp[midX]);
// Now we can compute final position in the target
// array of median of the X sub-array.
var midTo = lowTo + midX - lowX + midY - lowY;
to[midTo] = temp[midX];
// The rest is to merge X[lowX .. midX - 1] with
// Y[lowY .. midY - 1] and X[midx + 1 .. highX]
// with Y[midY .. highY] preceeding and following
// median respectively in the target array. As
// pairs are idependent from their final position
// perspective they can be merged in parallel.
depth--;
Parallel.Invoke(
() => ParallelMerge(to, temp, lowX, midX - 1, lowY, midY - 1, lowTo, depth),
() => ParallelMerge(to, temp, midX + 1, highX, midY, highY, midTo + 1, depth)
);
}
// Searches for index the first element in low to high
// range that is strictly greater than provided value
// and all elements within specified range are smaller
// or equal than index of the element next to range is
// returned.
private int BinarySearch(T[] from, int low, int high, T lessThanOrEqualTo)
{
high = Math.Max(low, high + 1);
while (low < high)
{
var mid = (low + high) / 2;
if (Less(from[mid], lessThanOrEqualTo))
low = mid + 1;
else
high = mid;
}
return low;
}
private static int GetMaxDepth()
{
// Although at each step we split unsorted array
// into two equal size sub-arrays sorting them
// not be perfectly balanced because parallel merge
// may not be balanced. So we add some extra space for
// task creation and so will keep CPUs busy.
return (int) Math.Log(Environment.ProcessorCount, 2) + 4;
}
}
On a two cores machine I got that parallel merge sort is more than 2x
faster than sequential quicksort and up to 25% faster than parallel
quicksort but at the cost of additional O(n) space. Still it is a good
example of how to use dynamic task parallelism. Enjoy!







0 Comments